7.3.5.7 Automatic Landings / ILS Approaches
Landing preparations
Prerequisite
The airport and the runway, which is going to be approached, has been added
to the navigation database.
These steps are done either preflight or during the flight before entering the landing pattern.
|
Step |
Action |
|
1 |
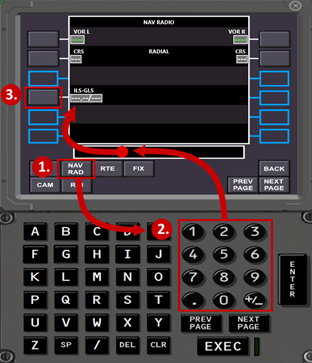
Tune the ILS on the NAV RAD page of the FMS. Enter the frequency of the ILS as shown the following screenshot:
Hint: If you don’t know the ILS frequency from memory, you can browse through the navigation database using the FIX page on the FMS. |
|
2 |
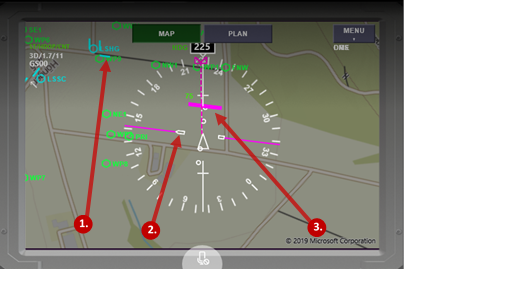
After the ILS frequency has been tuned, the Navigation Display mode changes to APP display mode, which has the following elements:
❶ In this example, this runway is going to be approached. It has a course of 142°. The extended runway center line is reached after flying course 225° for a while. ❷ The runway course pointer shows the direction of the runway. ❸ The deviation indicator is a bar, that shows by deflection in both directions how far the aircraft currently is from the extended runway center line. In this example, as the aircraft would approach the extended runway center line on course 225°, this bar would slowly creep to the center and the moment, when the aircraft reaches the extended center line, the deviation bar and the runway course pointer would fall in one line.
Alternatively, the APP display mode can also be activated manually at any time using the APP Selector (not to be mistaken from the APP button on the autopilot Mode Control Panel!):
Other display modes are MAP (to show the planned flight route) or VOR (similar like APP but to follow VOR radials without controlling the vertical channel). |
|
|
|

Landing procedure
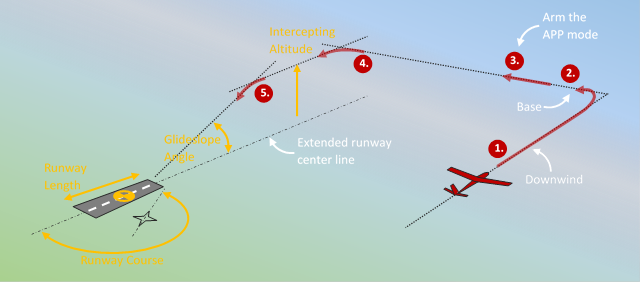
The following diagram shows the approach pattern and the automatic ILS approach as it is flown with both copter and plane. The parameter in yellow are defined in the navigation database:
|
Step |
Action |
|
1 |
Use the autopilot and its BASIC modes (SPD, TRK, ALT, VS, FPA or FLCH) to fly the first part of the landing pattern. This means, that you first fly the downwind (❶), at the end of the downwind turn into base (❷) in order to fly a course, that intersects the extended runway center line. |
|
3 |
Reduce SPD a bit coming from cruise. The SPD mode remains active until the Ardupilot LAND mode gets automatically activated. |
|
4 |
While approaching the extended runway center line, arm the Approach-mode on the Mode Control Panel using the APP button (❸):
Once the APP mode is armed, both the glideslope and the localizer will be captured and followed automatically whenever either of them is intersected. So, pressing the APP button, while the aircraft is on a suitable course to capture the ILS (and also has a suitable altitude), is the last manual action done by the pilot. From that point on the flight will continue fully automated and end with a full stop landing. |
|
5 |
The autopilot is capable to capture the ILS localizer (❹) coming from any inbound course (even if e.g. a 170° turn is required). Regardless of the intersecting course, the moment, when the turn to the runway needs to begin, is exactly calculated to end up on the runway center line once the turn is completed. Nevertheless, in order to fly a realistic and smooth ILS approach, aim to intersect the runway center line with an angle between 30° to 90° (in manned aviation 30° is common). |
|
6 |
Ideally (and realistically) the aircraft is still flying level after the localizer has been captured and the glideslope is approached from below. As the APP mode is active, the aircraft will automatically capture the glideslope and begin the final descend as soon as the glideslope is intersected (❺). |

Implementation of the final approach
After step 6 in the procedure above has been completed, the fully automated final approach has started.
The implementation of the final approach differs between plane and copter.
Final approach with multicopters (ArduCopter):
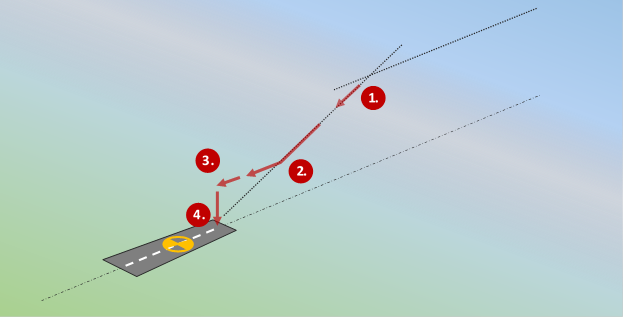
❶ At first,
Copters will stay in GUIDED mode and will descend on the glideslope towards the
runway.
❷ The moment, when an altitude of 7m
above ground will be reached, the descend will stop and the copter will
continue in level flight until the begin of the runway is reached.
❸ At that point, forward speed will
be cut to zero, and the FlightZoomer auto flight controller will put the copter
automatically in LAND mode.
❹ The ArduCopter LAND mode will then
simply perform a straight down descend.
ILS approaches for copter are explained in this YouTube
video:
https://www.youtube.com/watch?v=LIytO4afRMw
Final approach with planes (ArduPlane):
For plane, the FlightZoomer auto flight controller will put the aircraft in LAND mode right after the final approach has started (at point ❺ in the description above). All through the final approach, ArduPlane’s LAND mode will be in charge of controlling the flight.
The precision, which can be expected therefore directly depends on the accuracy of ArduPlane’s LAND mode. Consult the respective ArduPlane documentation, to get the best possible automatic landings.