7.3.5.1 Common guidelines
Operating the FlightZoomer autopilot, the following points need to be
considered:
Common considerations:
· Activating the autopilot, FlightZoomer changes the mode of the flight controller (to Guided for copters and Auto for planes).
· Deactivating the autopilot can be done in two ways:
o
Either by pressing the A/P button on the Mode Control Panel:

o Or by manually switching the flight controller into another mode using the transmitter. FlightZoomer will detect the changed mode and switch off immediately the FlightZoomer autopilot. Typically, this method is used by switching to RTL manually as soon as something unexpected happens.
· The recommended emergency procedure is switching ArduPilot manually into RTL mode by a switch on the RC transmitter.
Considerations for copter:
Use a well-tuned multicopter:
· The starting point for FlightZoomer autopilot operations is having a well-tuned multicopter. Optimize ArduCopter until you are satisfied with the handling in RTL or Loiter mode.
ArduPilot mode for autoflight:
· For FlightZoomer autopilot operations, ArduCopter is put into Guided mode.
Use a well-tuned aircraft:
· The starting point for FlightZoomer autopilot operations is having a well-tuned aircraft. Optimize ArduPlane until you are satisfied with the plane handling in RTL or Cruise mode.
Airspeed sensor usage:
· The aircraft can be equipped with or without airspeed sensor.
Autoflight accuracy:
· Be aware that the accuracy of the autopilot modes will not be as good as in the simulator. The accuracy of the altitude hold mode is at best as good as with ArduPlane’s own Cruise mode. Also, speed may swing more than expected around the target value (especially when flying without airspeed sensor, the speed target can only be considered as a rough indication of how much power will be set on average).
Ardupilot flight protections:
· For speed, throttle and altitude ArduPlane’s internal mechanisms as TECS and Throttle Nudging remain effective during FlightZoomer autopilot operations (the same way how they work in Auto mode).
Interactions with ArduPilot for autoflight:
· For FlightZoomer autopilot operations, ArduPlane is put into Auto mode.
· To process any of the FlightZoomer autopilot modes, a dynamically updated waypoint is automatically injected into the ArduPlane mission at the second position (so the home waypoint is not affected).
· When the FlightZoomer autopilot is switched off, the previously loaded mission is loaded into ArduPlane again. If the autopilot was deactivated by the A/P button, FlightZoomer also activates the ArduPlane Cruise mode, so you can easily continue flying manually.
Dependency and interaction with ArduPlane parameters for autoflight:
· FlightZoomer adopts to the connected aircraft in a flexible way by using ArduPlane parameters for calculations.
· The valid speed range for autopilot operations is simply derived from the ArduPlane Parameters ARSPD_FBW_MIN and ARSPD_FBW_MAX. If you wish to change the speed range, use Mission Planer to adjust these two values.
· Likewise, FBWB_CLIMB_RATE is used to limit the possible vertical speeds and flight path angle.
· The ARSPD_USE parameter is used to determine, whether an airspeed sensor is in use.
· If an airspeed sensor is in use, the target airspeed is commanded by overwriting the value of the TRIM_ARSPD_CM-parameter with the target speed.
·
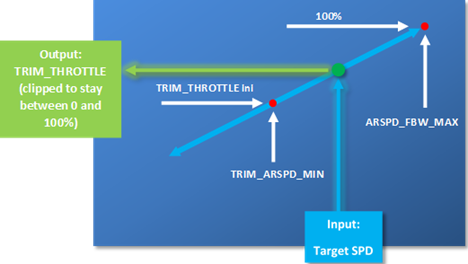
If no airspeed sensor is in use, the target airspeed is commanded
by overwriting the TRIM_THROTTLE-parameter according to this algorithm:
· The parameter LIM_ROLL_CD is overwritten to control the commanded turn rate. The parameter is only overwritten while a turn is ongoing in HDG or TRK mode and is reset to the default value immediately after the turn is completed.
· The roll limits are defined as follows:
o Turnrate Position => Value
o AUTO => LIM_ROLL_CD is reset to original value as read from memory initially
o Position 1 (5 on UI) => LIM_ROLL_CD = 10°
o Position 2 => LIM_ROLL_CD = 15°
o Position 3 => LIM_ROLL_CD = 20°
o Position 4 => LIM_ROLL_CD = 35°
o Position 5 (60 on UI) => LIM_ROLL_CD = 45°
Flight tactics:
· As fixed wing aircraft never stop, you need to anticipate the flight maneuvers ahead.
· If you command a turn, consider already the location and the flying direction the plane will end up after the turn. Avoid ending up in situations, where no escape is possible.
· For these reasons fly at places where you have enough space.
· Whenever possible fly higher than obstacles like mountains, trees or power lines.